Servo là gì ? Động cơ Servo là gì ? Bạn đã tường coi trên tivi về những loại thiết bị Robot, máy móc… Thì chắc hẳn cũng đã từng đtặ ra câu hỏi tại sao những thiết bị đó lại hoạt động chính xác được nhỉ? Ví dụ như các loại Robot đặt bom được ứng dụng trong quân sự, các loại máy cắt gọt cơ khí chính xác hay các Ăng- ten điều khiển từ xa.
Làm thế nào àm chúng có thể hoạt động chính xác đến từng vị trí rất nhỏ được nhỉ? Có phải các thiết bị này đang dùng những động cơ thông thường không?

Câu trả lời cho các câu hỏi trên đó chính là động cơ Servo (Hay Servo Morto). Chúng đa được con người chế tại ra và ứng dụng từ rất lâu rồi. Sự ra đời của động cơ Servo là một bước tiến lớn cho ngành kỹ thuật. Chúng là một thiết bị quan trọng đóng góp phần xây dựng lên ngành chế tạo cơ khí chính xác ngày này.
Bài viết này mình xin được chia sẻ đến với các bạn tất tần tật những kiến thức liên quan tới động cơ Servo là gì? Chúng có cấu tạo như thế nào? Nguyên lý hoạt động của chúng ra sao?
Servo Motor là gì?
Đầu tiên để tìm hiểu về Servo Motor là gì thì hãy cùng đi vào khái niệm chung của chúng.
Khái niệm cơ bản về Servo Motor
Servo Motor hay còn được gọi là Động cơ Servo. Chúng là sự kết hợp giữa động cơ điện và các linh kiện điện tử. Động cơ Servo (Servo motor) được sử dụng phổ biến nhất trong các ngành công nghệ ứng dụng về mảng công nghiệp và tự động hoá.
Chúng thực chất là một loại động cơ truyền động quay hoặc tuyến tính cung cấp khả năng điều khiển vị trí nhanh chóng cho các hệ thống điều khiển vòng kín.
Điều khiển vòng kín là gì?
Điều khiển vòng kín đó chính là sự giao tiếp giữu động cơ và thiết bị điều khiến. Khi thiết bị điều khiển cung cấp một giá trị điện nào đó cho động cơ, thì đông cơ sẽ chạy theo đúng giá mà bộ điều khiển sẽ cung cấp.
Trong quá trình động cơ chạy thì chúng sẽ phản hồi lại tín hiệu liên tục cho bộ điều khiển biết Tốc độ bao nhiêu và Momen lực là bao nhiêu.
Nguyến lý hoạt động Servo Motor
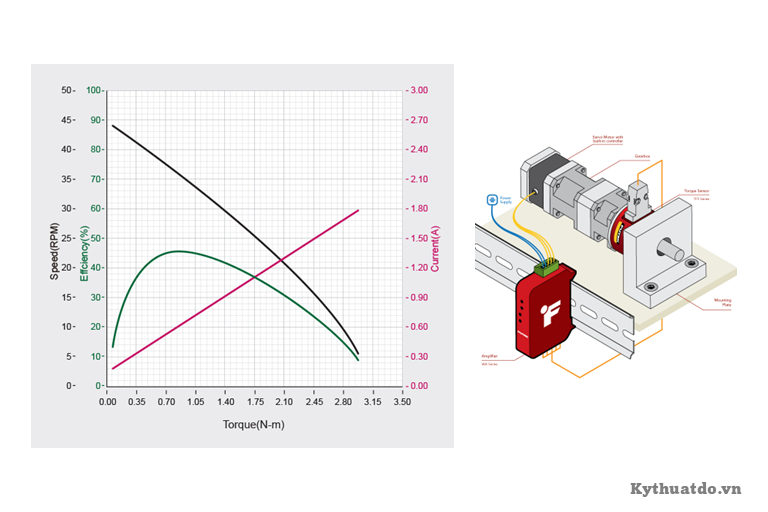
Nguyên lý hoạt động của Servo Motor đó chúng là một phần của hệ thống vòng kín cho nên khi hoạt động thì động cơ luôn phản hồi vị trí của mình cho bộ điều khiển biến. Các giá trị phản hồi như sau:
- Tốc độ quay của trục
- Momem xoắn (Torque)
- Vị trí hoạt động
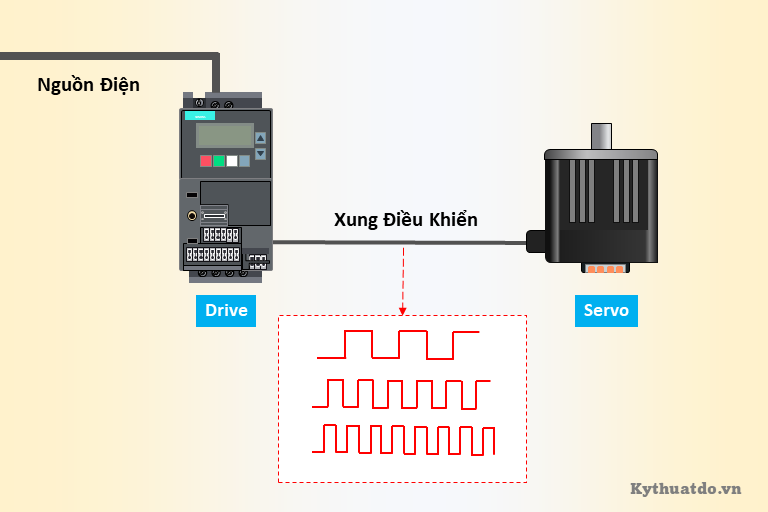
Nguyên lý vòng kín của Servo sẽ hoạt động như sau: Các bạn có thể nhìn vào hình ở phần bên trên có thể thấy. Khi PLC truyền một tín hiệu điện cho biên tần (Drive) để điều khiển động cơ. Thì biết tần này sẽ dựa vào tín hiệu của PLC và xuất ra tín hiệu điện nối với động cơ.
Tuỳ vào dong điện và điện áp mà biến tần cung cấp cho động cơ thì động cơ sẽ quay với vận tốc và Momen nhất định. Trong quá trình quay thì ở phía cuối của động cơ có gắn một Encoder. Encoder sẽ ghi lại giá trị tốc độ quay này và phản hồi ngược lại Biến tần (Drive).
Quá trình này hoạt động liên tục và song song với nhau xây xưng lên một hệ thống điều khiển vòng kín trên Servo.
Servo là gì ? Động cơ Servo là gì ? Vậy động cơ Servo có cấu tạo như thế nào?
Cấu tạo của động cơ Servo
Có rất nhiều các tài liệu trên mạng chia động cơ Servo theo nhiều cách. Nhưng chung lại chúng sẽ có 3 bộ phận chính cấu thành như sau:
- Động cơ điện
- Drive điều khiển
- Encoder phản hồi
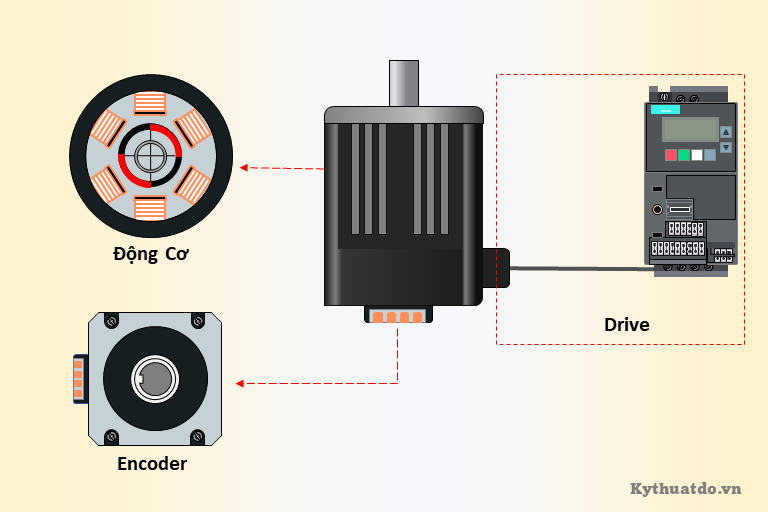
Động cơ điện
Động cơ điện đóng vao trò truyền động lực cho các cơ cấu chấp hành. Chúng giống như các động cơ điện thông thường có thể là loại AD hoặc DC.
Chung sẽ nhận tín hiệu điện từ Drive để thực hiện truyền động. Vận tốc và Momem xoắn sẽ được sản sinh ra tuỳ thuộc vào Dive cấp cho động cơ là bao nhiêu.
Drive
Đây là phần quan trọng nhất trong động cơ Servo. Chúng nhận tín hiệu từ hệ thống điều khiển và khếch đại tín hiệu này lên xong sau đó truyền vào động cơ Servo theo tỉ lệ tuyến tính với hiệu lệnh.
Hiểu đơn giản là chúng sẽ nhận tín hiệu điều khiển từ hệ thống. Xong sau đó khuyết đại tín hiệu này lên và cấp cho động cơ. Tín hiệu nhận vào và tín hiệu xuát ra sẽ có tỷ lệ thuận với nhau. Các tín hiệu nhận vào đó là những mong muốn của người dùng, ví dụ như tốc độ, vị trí hay momen xoắn.
Encoder
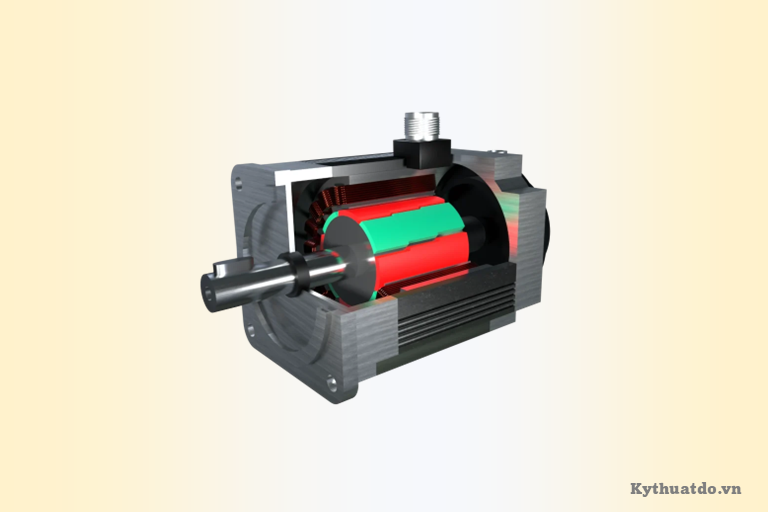
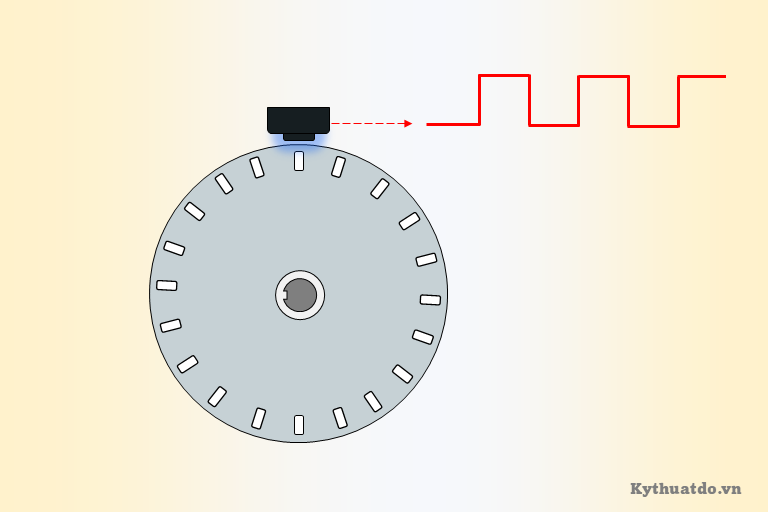
Encoder thực ra chúng là một dạng cảm biến đo tốc độ vòng xoay của trục. Chúng sẽ được gắn ở trêb trục và được trục dẫn độc. Trên trục này sẽ có những vạch chia nhỉ tuỳ thuộc vào độ phân giải của Encoder, Ví dụ trục xoay 360 độ tương đương với 1000 xung thì Encoder này có độ phân giả là 1000. Dựa vào điều này Encoder sẽ biết được trục quay bao nhiều vòng và xuất tín hiệu xung đưa về bộ điều khiển.
Với các Encoder đời cũ thường gặp một vấn đề đó là khi bông nhiên máy móc đang hoạt động bị mất điện. Chúng sẽ không lưu giá trị này lại được và khi có điện trở lại chũng sẽ hiểu toạ độ lúc mất điện là toạ độ ban đầu. Điều này dễ khiến máy móc hư hỏng, các cơ cấu châp hành sẽ đi sai quỹ đạo.
Cho nên Encoder ngay nay đa được cải tiến và nâng cấp khá nhiều. ngay cả khi mất điện và có điện lại chúng cũng đều biết được giá trị hiền hành so với gốc toạ độ ban đầu.
Phân loại Servo Motor
Phân loại động cơ sẽ dựa vào 3 yếu tố như sau:
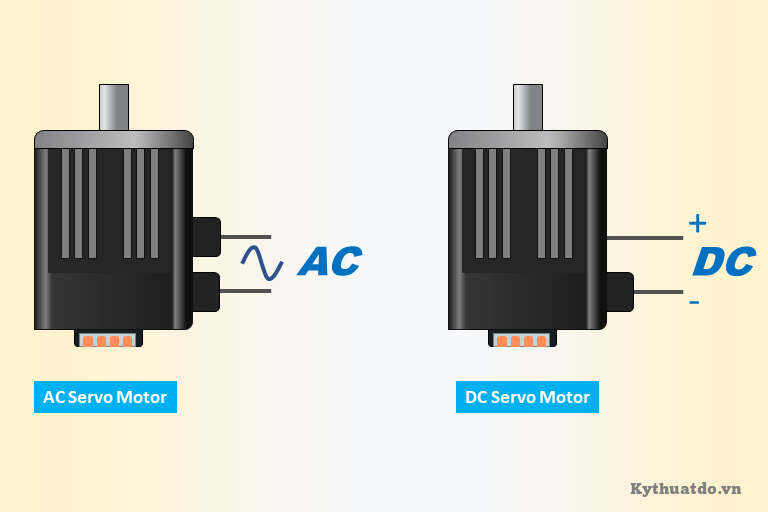
- Điện đầu vào là gì: Servo AC và Servo DC
- Động cơ có chổi than và không chổi than
- Động cơ đồng bộ và không đồng bộ
Servo AC hay DC
Dựa trên dòng điện mà động cơ sửa dụng ta sẽ chia làm hai dnagj điện đó là động cơ sử dụng điện AC và DC. Sự khác biết lớn nhất của hai loại này đó là khả năng kiếm soát tốc độ.
- Đầu tiên là về động cơ DC thì tốc độ của động cơ sẽ tỉ lệ thuận với điện áp cung cấp (Khi tải không đổi).
- Còn đối với động cơ AC thì tốc độ sẽ phụ thuộc vào tần số của điện áp đặt vào lượng từ. Công suất của loại động cơ Servo AC vượt trôi hơn DC.
Mặc dù cả hai loại động cơ AC và DC được sử dung trong các hệ thống tự động hoá. Nhưng loại động cơ AC chịu được dòng điện cao hơn và có khả năng tạo ra lực xoắn lớn hơn. Cho nên các hệ thống máy móc có tải lớn thường người ta sẽ sử dụng Servo Motor.
Đối với những có cấu lặp đi lặp lại liên tục và cần đòi hỏi độ chính xác cao thì người ta cũng sẽ ưu tiên Servo AC hơn là DC.
Động cơ có chổi than hay không chổi than
Dạo mấy năm gần đây thì động cơ không chổi than được bắt gặp khá nhiều trong công nghiệp. Vậy loại động cơ có chổi than tốt hơn hay không ó chổi than tốt hơn?
Đối với loại có chổi than thì chúng tương đối rẻ hơn so với loại không có chổi than. Cách vận hành của động cơ Servo có chổi than cũng đơn giản.

Còn đối với loại không có chổi thanh thì giá thành của chúng sẽ mắc hơn. Nhưng bù lại độ chính xác của chúng lại cao hơn loại có chổi than. Hơn nữa khi hoạt động chũng sẽ không bị ồn như loại có chổi than.
Mỗi loại đều có ưu nhược điểm riêng. Nhưng phần lớn người ta vẫn lựa chọn có chổi than bởi gì chúng có giá thành rẻ và cấu tạo đơn giản tiện cho việc bào trì cũng nhưu thay thế.
Động cơ đồng bộ hay không đồng bộ
Nếu như động cơ Servo DC thường chia làm hai loại có chổi than và không có chổi than, thì động cơ AC lại khác. Động cơ Servo AC sẽ dựa vào tốc độ để phân biệt ra. Mà tốc độ này sẽ quyết định bởi tốc độ quay của từ trường cùng với Rotor, hay còn gọi là loại động bộ và không đồng bộ.
Vậy động cơ đồng bộ là gì? Không đồng bộ là gì?
- Loại động cơ đồng bộ tức tốc độ quay của từ trường Stator sẽ bằng tốc độ quay của Rotor
- Động cơ không đồng bộ thì sẽ khác. Từ trừng ở Stator sẽ có tốc độ quanh nhanh hơn tốc độ của Roto.
Tốc độ của động cơ không đồng bộ có thể thay đổi bằng điều chỉnh số lượng các cực của động cơ.
Dựa vào đặc điểm này các bạn có thể phân biệt được giữa các loại động cơ Servo với nhau.
Vậy điều khiển động cơ Servo bằng cách nào? Dùng thiết bị gì để điều khiển động cơ Servo?
Các chế độ điều khiển Servo Motor
Đọc tới đây chắc nhiều bạn cũng hiểu gần như hết về động cơ Servo rồi đúng không. Nhưng mà để nó chạy được tốc độ mịn màng mà không bị “dật dật” thì không phải điều đơn giản. Các bạn cứ nghĩ cấp điện vô hay cấp xung vô là nó chạy ổn định.
Đừng mơ !
Trong qua trình chạy nó sẽ gửi tín hiệu phản hồi liên tục và bộ điều khiển. Và bộ điều khiển xẽ sử dụng thuật toán PID để so sánh và đưa ra tín hiệu điều khiển hợp lý nhất.
Động cơ servo thường được điều khiển bởi ba mạch, đó là ba hệ thống điều khiển PID phản hồi âm điều khiển vòng kín. Mạch PID là mạch dòng điện và được thực hiện bên trong bộ điều khiển servo.
Dòng điện đầu ra từ bộ điều khiển đến động cơ dựa trên việc kiểm tra các phần tử Hall, dòng điện phản hồi âm được đặt dựa trên PID và dòng điện đầu ra được điều chỉnh sao cho càng gần với dòng điện đã đặt càng tốt. Mạch hiện tại điều khiển mô-men xoắn của động cơ, vì vậy bộ điều khiển có ít hoạt động hơn và ít phản ứng động hàng ngày hơn và sẽ nhanh hơn trong chế độ điều chỉnh mô-men xoắn.
Điều khiển mô-men xoắn
Chế độ điều khiển mô-men xoắn là thông qua đầu vào analog bên ngoài hoặc chỉ định địa chỉ trực tiếp để thiết lập mô-men xoắn ra mô-men xoắn kích thước bên ngoài, ví dụ, 10V tương ứng với 5Nm, khi thiết lập tương tự bên ngoài ở 5V, đầu ra trục động cơ là 2,5Nm : nếu động cơ trục tải dưới 2,5 Nm, động cơ chạy ở CW, khi tải bên ngoài bằng 2,5 Nm, động cơ không chạy. Nếu động cơ lớn hơn 2.5Nm, động cơ sẽ đảo ngược khi chạy (thường dưới điều kiện trọng tải).

Chúng ta có thể thay đổi cài đặt tương tự để thay đổi kích thước mô-men xoắn; cũng có thể thay đổi địa chỉ tương ứng thông qua cách truyền thông để đạt được giá trị. Ứng dụng trên thiết bị cuộn và cuộn dây, có yêu cầu nghiêm trọng về lực lượng vật liệu, chẳng hạn như thiết bị cuộn dây hoặc thiết bị kéo sợi, thiết đặt mô men có thể thay đổi bất cứ lúc nào dựa trên sự thay đổi của bán kính quanh co, để đảm bảo lực vật liệu sẽ không thay đổi với quanh co bán kính thay đổi.
Điều khiển vị trí
Chế độ kiểm soát vị trí thường thông qua tần số đầu vào xung bên ngoài để xác định kích thước của tốc độ quay, số xung để xác định góc quay, và một số servo có thể trực tiếp thông qua các chế độ truyền thông để phân định tốc độ và thuyên. Khi chế độ vị trí có kiểm soát rất chặt chẽ về tốc độ và vị trí, do đó, nó thường được áp dụng trên thiết bị định vị.
Một số động cơ servo có thể gán giá trị cho tốc độ và độ dịch chuyển trực tiếp thông qua giao tiếp. Vì chế độ định vị có thể kiểm soát chặt chẽ tốc độ và vị trí nên nó thường được sử dụng trong các thiết bị định vị, máy công cụ CNC, máy in, v.v.
Điều khiển độ tốc độ
Chúng ta có thể kiểm soát tốc độ quay thông qua các đầu vào tương tự hoặc tần số xung, với điều khiển thiết bị PLC vòng ngoài vòng PID, chế độ tốc độ cũng có thể vị trí, nhưng tín hiệu vị trí động cơ hoặc tín hiệu vị trí tải trực tiếp phải cung cấp cho PLC để hoạt động.
Chế độ vị trí cũng hỗ trợ tín hiệu vị trí phát hiện vòng lặp trực tiếp tải, bộ mã hoá tại trục động cơ chỉ phát hiện được tốc độ của động cơ tại thời điểm này, và tín hiệu vị trí được cung cấp bởi thiết bị phát hiện tải cuối cùng, có lợi thế giảm thiểu sai sót trong quá trình truyền dẫn trung gian, tăng độ chính xác vị trí của toàn bộ hệ thống.
Dùng PID điều khiển 3 vòng lặp
Nói về 3 vòng, servo động cơ nói chung là kiểm soát bởi ba vòng, ba vòng là ba vòng lặp đóng vòng lặp phản hồi tiêu cực hệ thống điều chỉnh PID.
Vòng lặp đầu
Các vòng lặp PID bên trong là vòng lặp hiện thời, là hoàn toàn chạy trong các ổ đĩa servo, thông qua các thiết bị Hall để phát hiện ra ổ đĩa đầu ra của mỗi giai đoạn để xe máy, phản hồi tín hiệu đến hệ thống. PID sẽ thực hiện điều chỉnh, để đạt được dòng điện đầu ra gần nhất có thể tương đương với dòng điện thiết lập, vòng lặp hiện tại là để điều khiển mô-men xoắn động cơ, do đó chế độ không tải, động cơ servo hoạt động nhỏ nhất, nhưng đáp ứng động nhanh nhất.
Vòng lặp tốc độ
Vòng thứ hai là vòng lặp tốc độ, thông qua việc phát hiện tín hiệu encoder động cơ để thực hiện điều chỉnh PID âm phản hồi; đầu ra vòng PID của nó là trực tiếp thiết lập vòng lặp hiện tại; do đó điều khiển vòng lặp tốc độ chứa vòng lặp tốc độ và vòng lặp hiện tại. Trong một từ khác, bất kỳ chế độ phải sử dụng các vòng lặp hiện tại, nó là điều khiển cơ bản; khi tốc độ và kiểm soát vị trí; hệ thống thực sự thực hiện việc kiểm soát hiện tại (mô-men xoắn) để đạt được điều khiển tương ứng tốc độ và vị trí cùng một lúc.
Vòng lặp vị trí
Vòng thứ ba là vòng lặp vị trí, là vòng ngoài cùng, có thể được xây dựng giữa bộ điều khiển servo và bộ mã hoá động cơ servo, cũng có thể được xây dựng giữa bộ điều khiển bên ngoài và bộ mã hoá động cơ servo hoặc tải cuối cùng, tùy theo tình hình thực tế để thiết lập. Vì đầu ra nội bộ của vòng lặp điều khiển vị trí là thiết lập của vòng lặp tốc độ, dưới chế độ kiểm soát vị trí, hệ thống làm hoạt động của cả ba vòng, hệ thống làm số lượng lớn nhất của hoạt động, và tốc độ phản ứng động cũng là chậm nhất.
Ứng dụng của Servo Motor
Ứng dụng Động cơ Servo được áp dụng trong nhiều hệ thống và sản phẩm công nghiệp và thương mại; chẳng hạn như rô-bốt; trong đó mô-tơ servo được sử dụng tại mọi “khớp nối” của rô-bốt để thực hiện góc chuyển động chính xác của nó.

Tính năng lấy nét tự động của máy ảnh sử dụng mô-tơ servo được tích hợp trong máy ảnh để điều chỉnh chính xác vị trí của thấu kính nhằm làm sắc nét các hình ảnh bị mất nét.
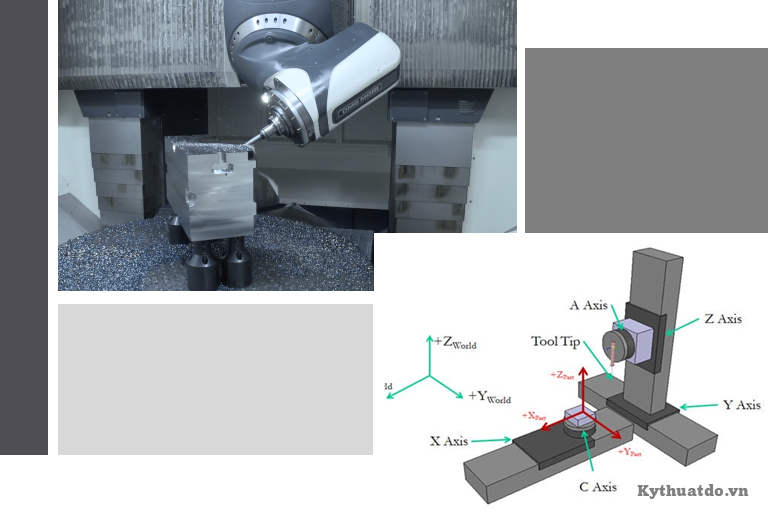
Điều khiển vị trí và tốc độ trục trong máy CNC
Điều khiến vị trí là ứng dụng thường thấy nhất của động cơ Servo trong nhiều hệ thống công nghiệp. Chúng sẽ được gắn ở những khớp nối cơ khí chẳng hặn như những cánh tay Robot để điều khiển chính xác vị trí và góc độ.
Một ví dụ điều khiển vị trí thường thấy rõ nhất là trong máy CNC. Đây là thiết bị gia công cơ khí chính xác và hiện đại trong nhà máy công nghiệp. Về cơ bản máy CNC hoạt độ sẽ dựa vào động cơ Servo và mạch điều khiển vị trí. Thường trong một máy CNC sẽ có nhiều Servo và mỗi động cơ sẽ thực hiện điều khiển một trục khác nhau.
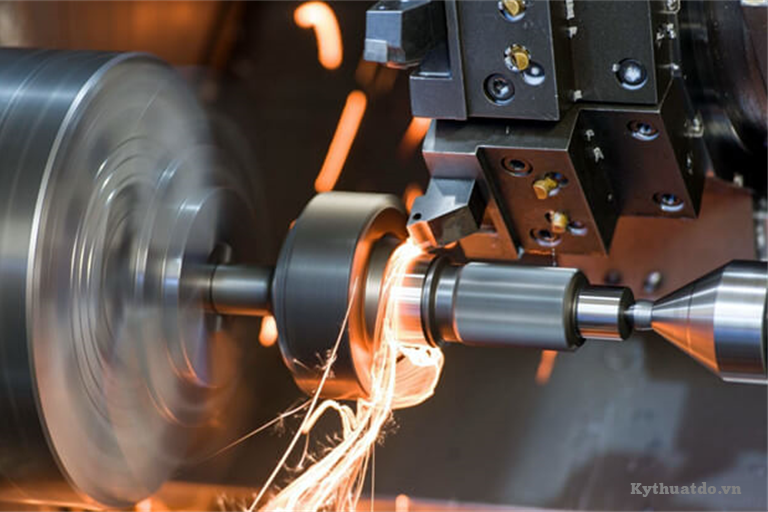
Mình bỏ quá yếu tốt vật liệu của lưỡi dao, Xét đến việc cắt gọt kim loại như sắt thép thì tốc độ của lưỡi dao đóng vai trò không nhỏ. Đối với mỗi vật liệu khác nhau thì tốc độ cắt cũng như tốc độ đi dao của chúng cũng khác nhau.
Ví dụ để cắt được đồng thì tốc độ cắt của dao phải 2000v/p; hoặc để cắt được sắt thì tốc độ phải 4000v/p (con số này mình chỉ lấy tham khảo). Vậy để điều chỉnh được số 2000 hay 4000 thì chỉ có thể dùng ccas loại động cơ Servo điều khiển.
Động cơ Servo trong Xe Robot
Các phương tiện robot ngày nay được sử dụng cho các ứng dụng quân sự; cũng như công nghiệp rất phức tạp sử dụng động cơ servo cho bánh xe. Ở đây, chuyển động góc không quan trọng vì servo được sử dụng là servo quay liên tục.
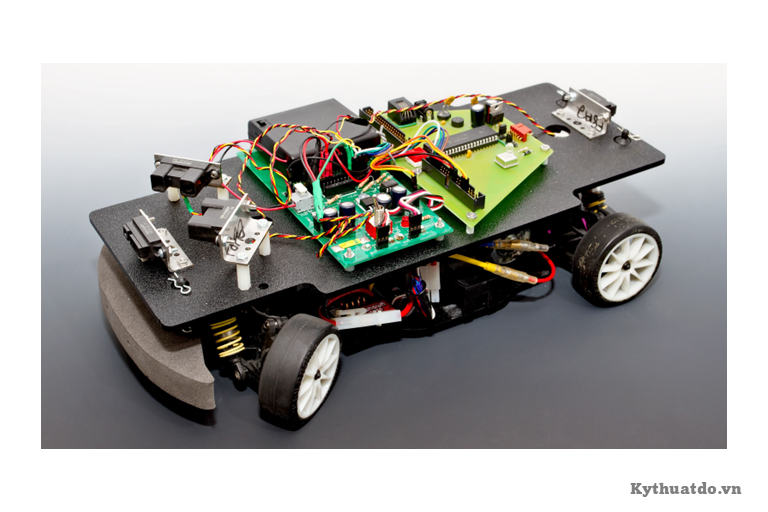
Khả năng của servo tạo ra đủ mô-men xoắn; để nhanh chóng di chuyển phương tiện từ trạng thái dừng và sau đó dừng nhanh chóng cũng là điều quan trọng. Ngoài ra, vận tốc mà chiếc xe sẽ di chuyển có thể được kiểm soát.
Động cơ Servo trong Cánh tay Robot
Bây giờ, để chọn một đối tượng từ vị trí A và đặt nó vào vị trí B; các động cơ được sử dụng để khởi động các khớp là động cơ servo. Điều này là do; chúng ta phải lập kế hoạch chuyển động góc của từng khớp để hoàn thành nhiệm vụ chọn và đặt này.
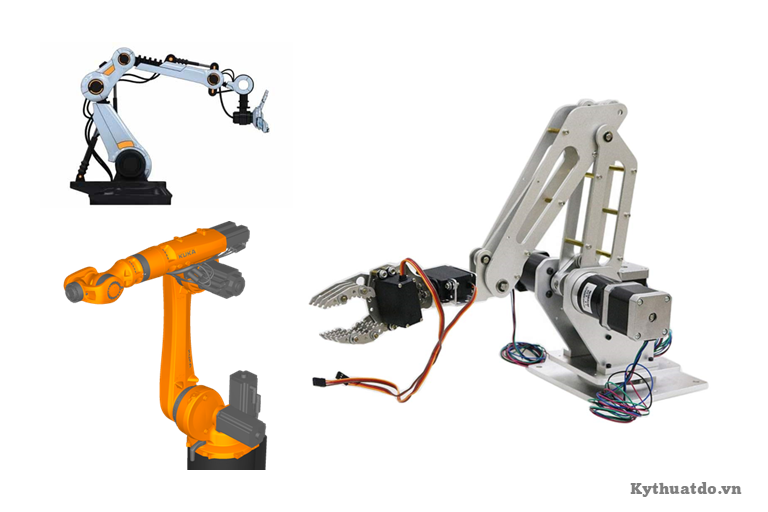
Sau khi dữ liệu này được cung cấp cho bộ điều khiển rô-bốt; rô-bốt sẽ tiếp tục thực hiện công việc của mình. Bộ điều khiển sẽ gửi dữ liệu PWM đến từng động cơ của rô-bốt. Điều này cho phép điều khiển góc chính xác của cánh tay; điều không thể thực hiện được với động cơ DC thông thường.
Ứng dụng của động cơ servo trong chế tạo rô-bốt có thể được trải nghiệm; ở quy mô nhỏ trong các dự án điện tử. Bộ khởi động Arduino tốt nhất sẽ bao gồm một động cơ servo nhỏ để thử nghiệm.
Động cơ servo trong Lấy nét tự động của máy ảnh
Máy ảnh kỹ thuật số hiện đại ngày nay rất tiên tiến. Một trong những tính năng nâng cao là khả năng tự động lấy nét đối tượng cần chụp. Khi hình ảnh của đối tượng được tạo trong bộ xử lý tín hiệu kỹ thuật số của máy ảnh, nó sẽ được kiểm tra độ sắc nét.

Về cơ bản, nếu độ dài tiêu cự (được đo từ ống kính máy ảnh) không phù hợp, hình ảnh sẽ bị mờ. Hành động hiệu chỉnh để định vị ống kính một cách chính xác sao cho chụp được hình ảnh sắc nét nhất được thực hiện bằng cách sử dụng động cơ servo có độ chính xác cao được lắp trong máy ảnh. Đây là một ví dụ quan trọng khác về ứng dụng động cơ servo.
Servo là gì ? Động cơ Servo là gì ?
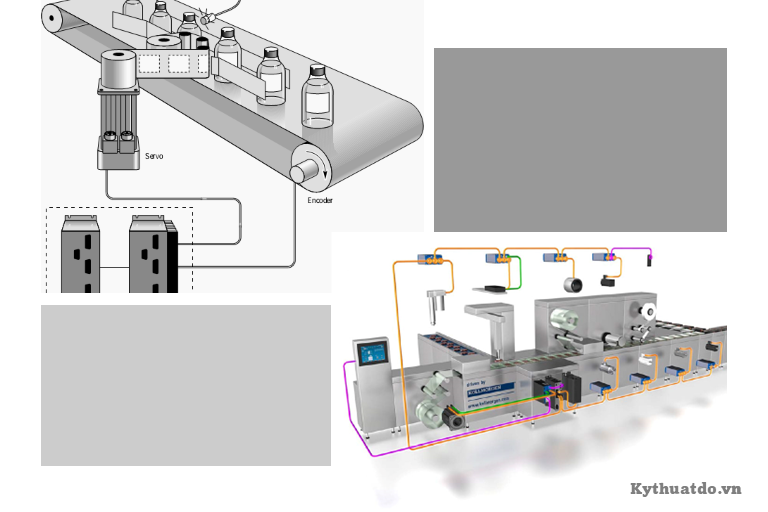
Động cơ Servo trong Băng tải
Băng tải được sử dụng trong các đơn vị sản xuất và lắp ráp Công nghiệp; để chuyển một vật thể từ trạm lắp ráp này sang trạm lắp ráp khác. Hãy xem xét một ví dụ về quy trình làm đầy chai; trong quá trình này; chai cần được đổ đầy chất lỏng và chuyển sang giai đoạn tiếp theo; chủ yếu là giai đoạn đóng gói.
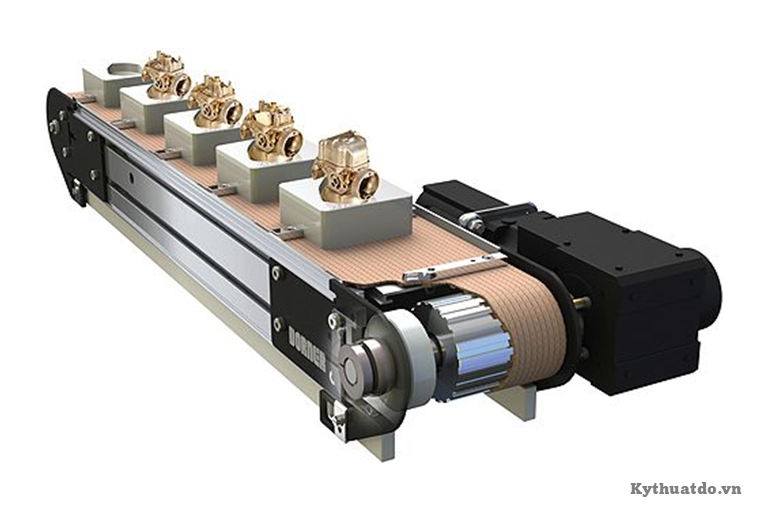
Vì vậy, để đạt được điều này băng tải được sử dụng với động cơ servo; để chai di chuyển chính xác đến vị trí mong muốn và dừng lại; để chất lỏng có thể được đổ vào đó và sau đó nó được dẫn đến giai đoạn tiếp theo. Quá trình này tiếp tục cho đến khi dừng lại. Do đó, khả năng điều khiển vị trí chính xác của trục servo trở nên hữu ích.
Servo là gì ? Động cơ Servo là gì ?
Kết luận
Như vậy, bài viết này; Trọng đã chia sẻ toán bộ những kiến thức liên quan tớiServo là gì ? Động cơ Servo là gì ? Cũng như cách hoạt động và ứng dụng của chúng. Qua bài viết này các bạn có thể đúc kết ra được; Servo Motor là một động cơ điện điều khiển vị trí và tốc độ. Ứng dụng với nhiều thiết bị máy móc khác nhau trong công nghiệp
Hi vọng bài viết này; sẽ giúp các bạn có thêm phần kiến thức mới về các thiết bị tự động hoá.
Cảm ơn các bạn đã theo dõi bìa viết của Trọng. Chúc các bạn thành công.
Liên Hệ
Kỹ sư cơ điện tử – Mr. Trọng
Zalo/mobie: 0975 116 329
Mail: trongle@huphaco.vn
BÀI VIẾT LIÊN QUAN